
CST618B概述:
CST618B为电池供电的玩具、低压或者电池供电的运动控制应用提供了一种集成的有刷直流马达驱动解决方案。
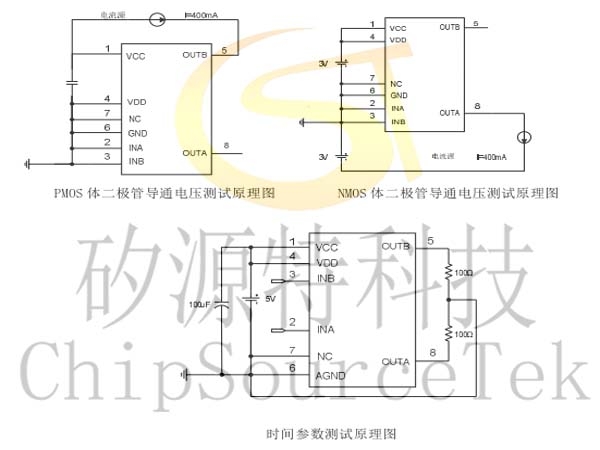
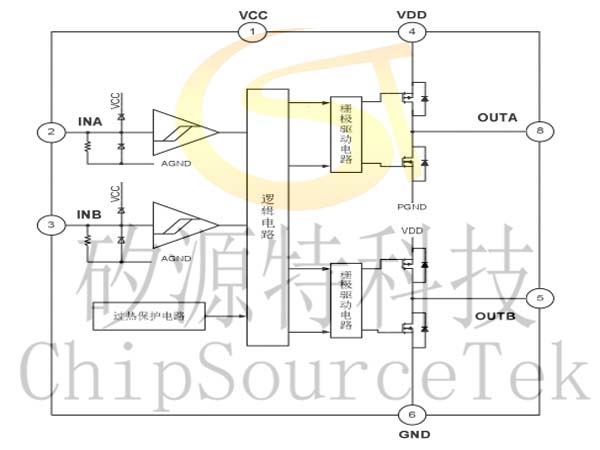
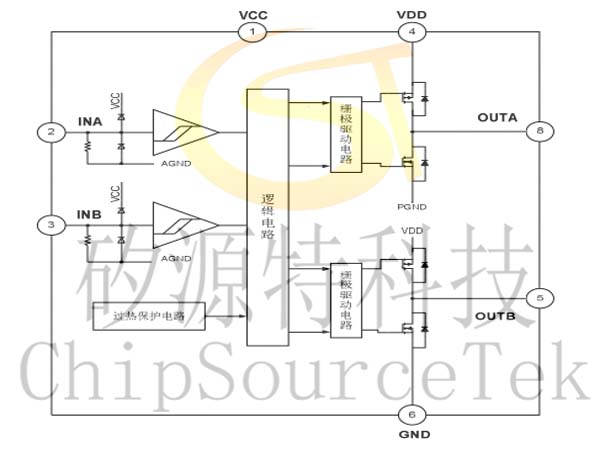
CST618B电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。
CST618B电路具备较宽的工作电压范围(从 2V 到 10V),最大持续输出电流达到 1.5A,最大峰值输出电流达到 2.2A。CST618B驱动电路内置过热保护电路。通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值 (典型值 150oC),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
CST618B提供SOP8封装.
CST618B电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。
CST618B电路具备较宽的工作电压范围(从 2V 到 10V),最大持续输出电流达到 1.5A,最大峰值输出电流达到 2.2A。CST618B驱动电路内置过热保护电路。通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值 (典型值 150oC),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
CST618B提供SOP8封装.
a) 待机模式
待机模式下,INA=INB=L。包括驱动功率管在内的所有内部电路都处于关断状态。电路几乎不消耗任何电流。此时马达输出端 OUTA 和 OUTB都为高阻状态。
b) 正转模式
正转模式的定义为:INA=H,INB=L,此时马达驱动端 OUTA 输出高电平,马达驱动端 OUTB输出低电平时,马达驱动电流从 OUTA 流入马达,从 OUTB 流到地端,此时马达的转动定义为正转模式。
c) 反转模式
反转模式的定义为:INA=L,INB=H,此时马达驱动端 OUTB 输出高电平,马达驱动端 OUTA输出低电平时,马达驱动电流从 OUTB 流入马达,从 OUTA 流到地端,此时马达的转动定义为反转模式。
d) 刹车模式
刹车模式的定义为:INA=H,INB=H,此时马达驱动端 OUTA 以及 OUTB 都输出低电平,马达内存储的能量将通过 OUTA端 NMOS 管或者 OUTB端 NMOS 快速释放,马达在短时间内就会停止转动。注意在刹车模式下电路将消耗静态功耗。
e) PWM 模式 A
当输入信号 INA 为 PWM 信号,INB=0 或者INA=0,INB 为 PWM 信号时,马达的转动速度将受 PWM 信号占空比的控制。在这个模式下,马达驱动电路是在导通和待机模式之间切换,在待机模式下,所有功率管都处于关断状态,马达内部储存的能量只能通过功率 MOSFET 的体二极管缓慢释放。 注意:由于工作状态中存在高阻状态,因此马达的转速不能通过 PWM 信号的占空比精确控制。如果 PWM 信号的频率过高,马达会出现无法启动的情况。
f) PWM 模式 B
当输入信号 INA 为 PWM 信号,INB=1 或者 INA=1,INB 为 PWM 信号时,马达的转动速度将受到 PWM信号占空比的控制。在这个模式下,马达驱动电路输出在导通和刹车模式之间,在刹车模式下马达存储的能量通过低边的 NMOS 管快速释放。
注意:由于工作状态中存在刹车状态,马达能量能快速释放,马达的转速能通过 PWM 信号的占空比精确控制,但必须注意如果 PWM 信号频率过低会导致马达因进入刹车模式而出现无法连续平滑转动的现象。为减小电机噪音,建议PWM 信号频率大于 10KHz,小于 50KHz
低待机电流 (小于0.1uA)
低静态工作电流
集成的H桥驱动电路
内置防共态导通电路
低导通内阻的功率MOSFET管
持续输出电流:1.5A
峰值输出电流:2.2A
内置含迟滞效应的过热保护电路 (TSD)
CST618B提供SOP8封装
CST618B应用:
2-6节AA/AAA干电池供电的玩具马达驱动
2-6节镍-氢/镍-镉充电电池供电的玩具马达驱动






 发送邮件
发送邮件 商务QQ客服
商务QQ客服 13823761625
13823761625